
Berita
 Rumah / Berita / Berita Industri / Bagaimana Anda Memilih Drive Slewing Horizontal yang Tepat untuk Aplikasi Anda?
Rumah / Berita / Berita Industri / Bagaimana Anda Memilih Drive Slewing Horizontal yang Tepat untuk Aplikasi Anda? Bagaimana Anda Memilih Drive Slewing Horizontal yang Tepat untuk Aplikasi Anda?
 2026.05.13
2026.05.13
 Berita Industri
Berita Industri
Memilih penggerak slewing horizontal yang tepat adalah salah satu keputusan yang terlihat mudah di permukaan namun dengan cepat mengungkapkan lapisan kompleksitas saat Anda mendalami persyaratan aplikasi. Pemilihan yang buruk tidak hanya menghasilkan kinerja yang buruk — namun juga gagal sebelum waktunya, menimbulkan beban pemeliharaan, dan dalam sistem yang kritis terhadap keselamatan, hal ini dapat menyebabkan waktu henti operasional yang mahal atau kecelakaan. Panduan ini menjelaskan setiap variabel seleksi yang penting, memberikan kerangka kerja praktis bagi para insinyur dan spesialis pengadaan untuk mengambil keputusan yang tepat pada kali pertama.
Apa Sebenarnya Fungsi Drive Slewing Horizontal
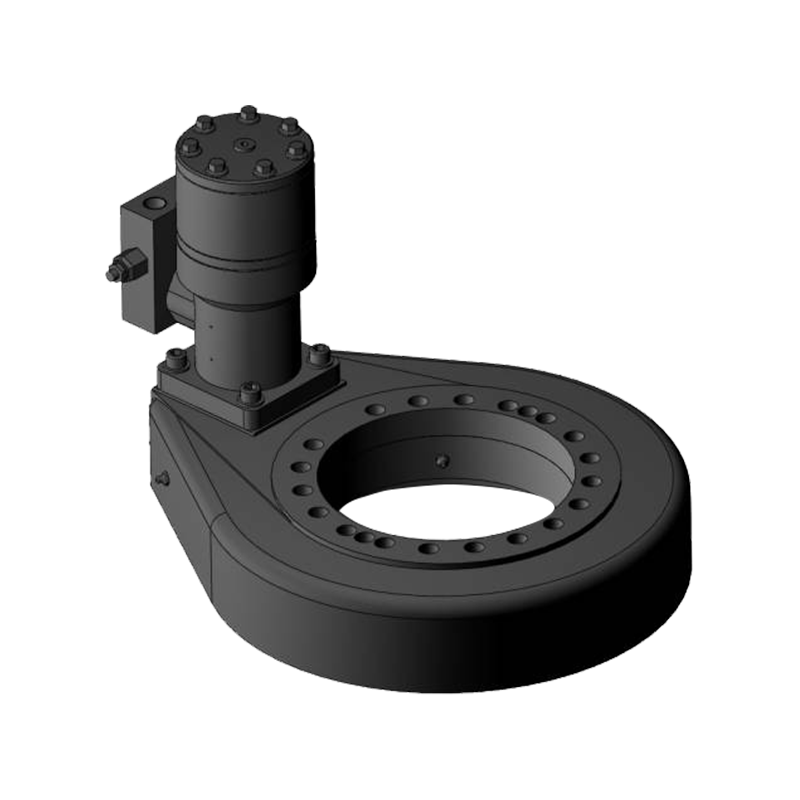
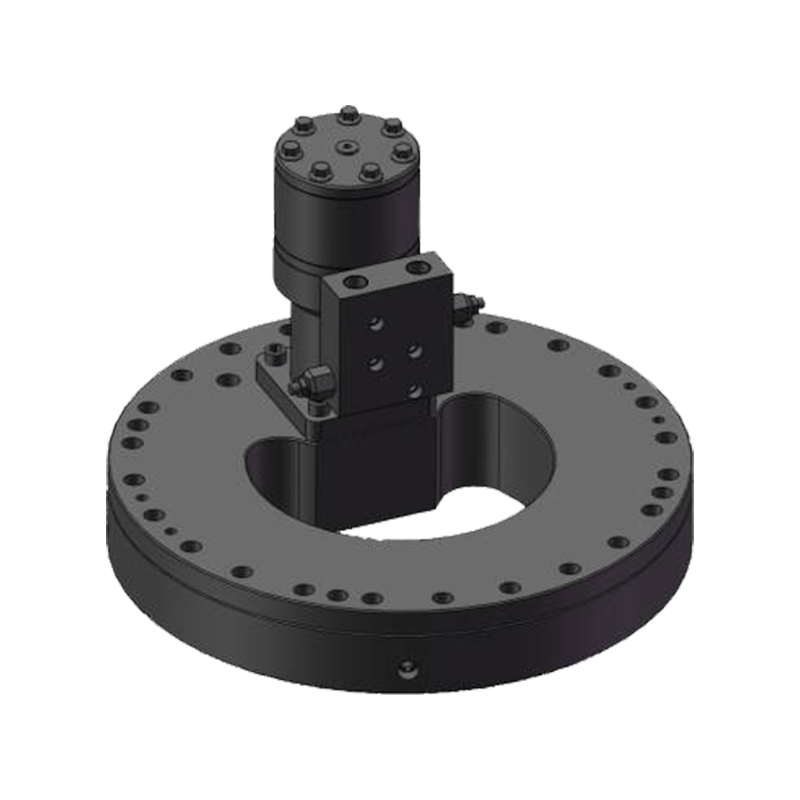
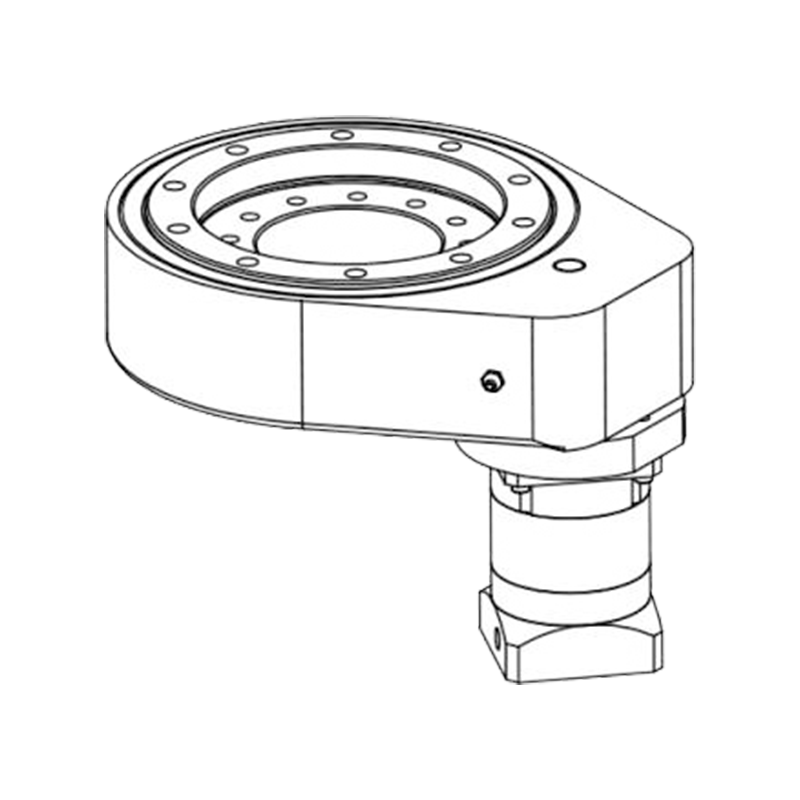
Penggerak slewing horizontal adalah aktuator putar tertutup penuh yang menggabungkan mekanisme reduksi roda gigi cacing dengan bantalan cincin slewing dalam satu wadah terintegrasi. Cincin slewing menangani beban radial, aksial, dan momen yang ditimbulkan oleh struktur berputar di atasnya, sedangkan roda gigi cacing memberikan keuntungan mekanis yang diperlukan untuk menggerakkan putaran tersebut dengan masukan motor yang relatif kecil. "Horizontal" mengacu pada orientasi sumbu keluaran penggerak — rotasi terjadi di sekitar sumbu vertikal, menjadikannya pilihan yang wajar untuk aplikasi di mana struktur harus berayun, bergeser, atau terus berputar pada bidang horizontal.
Tidak seperti slewing ring mandiri yang dipasangkan dengan girboks eksternal, penggerak slewing horizontal terintegrasi menyederhanakan pemasangan, meningkatkan integritas penyegelan, dan mengurangi upaya teknis yang diperlukan untuk merancang struktur di sekitarnya. Integrasi inilah yang menjadi alasan mengapa teknologi ini mendominasi aplikasi seperti pelacak surya, meja putar derek, platform kerja udara, sistem yaw turbin angin, dan pengatur posisi antena satelit — di mana pun diperlukan aktuasi putar yang ringkas dan mandiri dengan kapasitas beban tinggi.
Analisis Beban: Titik Awal yang Tidak Dapat Dinegosiasikan
Setiap pemilihan penggerak slewing horizontal dimulai dengan analisis beban yang lengkap. Melewatkan atau mendekati langkah ini adalah satu-satunya sumber kegagalan prematur yang paling umum. Ada tiga kategori beban yang harus ditangani oleh drive secara bersamaan, dan ketiganya harus diukur sebelum perbandingan katalog dimulai.
Beban Aksial
Beban aksial bekerja sejajar dengan sumbu keluaran penggerak — dalam penggerak slewing horizontal, ini biasanya merupakan bobot mati dari struktur berputar di atasnya. Susunan panel surya, superstruktur meja putar derek, atau rakitan antena semuanya membebani penggerak ke bawah. Ini adalah beban yang paling mudah untuk dihitung: beban ini pada dasarnya adalah massa total segala sesuatu yang berputar di atas penggerak, dikalikan dengan percepatan gravitasi, dan dinyatakan dalam kilonewton.
Beban Radial
Beban radial bekerja tegak lurus terhadap sumbu keluaran — secara horizontal, dalam kasus penggerak slewing horizontal. Tekanan angin pada panel atau antena besar merupakan sumber beban radial yang paling umum dalam aplikasi luar ruangan. Pembebanan eksentrik yang disebabkan oleh pusat gravitasi di luar pusat pada rakitan yang berputar juga berkontribusi pada komponen radial. Beban radial seringkali bersifat dinamis dan berarah, sehingga estimasi nilai puncak menjadi lebih penting daripada perhitungan nilai rata-rata.
Momen Pembalikan
Momen guling adalah beban lentur yang berupaya memiringkan struktur berputar relatif terhadap rumah penggerak. Hal ini dihasilkan setiap kali pusat gravitasi rakitan yang berputar tidak tepat di atas garis tengah rotasi penggerak, atau ketika gaya horizontal (seperti angin) bekerja pada ketinggian di atas bidang pemasangan penggerak. Momen guling dinyatakan dalam kilonewton-meter dan seringkali merupakan parameter beban yang paling menuntut — banyak penggerak yang lolos pemeriksaan beban aksial dan radial gagal dalam kapasitas momen guling.
Persyaratan Torsi dan Ukuran Motor
Setelah beban ditetapkan, torsi keluaran yang diperlukan harus dihitung. Ini adalah torsi yang diperlukan pada cincin keluaran penggerak untuk mengatasi semua gaya resistif dan mempercepat beban hingga kecepatan putaran yang diperlukan dalam waktu yang dapat diterima. Kontributor utama terhadap torsi yang dibutuhkan adalah gesekan dalam bantalan cincin slewing (yang meningkat seiring dengan beban aksial dan momen guling), gaya hambat aerodinamis pada struktur yang berputar, dan torsi inersia yang diperlukan selama fase akselerasi.
Penggerak slewing horizontal ditentukan berdasarkan torsi penahan terukur dan torsi kerja terukur — angka ini tidak sama. Torsi penahan adalah beban statis maksimum yang dapat ditahan oleh penggerak tanpa rotasi; torsi kerja adalah torsi kontinu yang tersedia selama pengoperasian. Karakteristik roda gigi cacing yang mengunci sendiri (terjadi ketika sudut depan berada di bawah sudut gesekan, biasanya ketika rasio roda gigi melebihi sekitar 20:1) berarti banyak penggerak slewing horizontal dapat mempertahankan posisinya di bawah beban tanpa rem terpisah — sebuah fitur yang menyederhanakan desain sistem dalam aplikasi seperti pelacak surya di mana penggerak harus menahan sudut panel terhadap beban angin tanpa pemberian energi motor secara terus menerus.
Pemilihan motor mengikuti torsi masukan yang diperlukan (torsi keluaran dibagi dengan rasio roda gigi, disesuaikan dengan efisiensi penggerak) dan kecepatan masukan yang diperlukan (kecepatan putaran keluaran dikalikan dengan rasio roda gigi). Kebanyakan penggerak slewing horizontal menerima motor rangka IEC atau NEMA standar, dan banyak yang dilengkapi motor dengan flensa pemasangan motor mesin.
Parameter Pemilihan Kunci Dibandingkan
| Parameter | Apa yang Harus Ditentukan | Rentang Umum | Risiko Seleksi jika Kurang Ditentukan |
| Beban Aksial Capacity | Total massa berputar × gravitasi | 5 kN – 2.000 kN | Deformasi ras bantalan, kejang |
| Momen Pembalikan | Beban eksentrik × lengan momen | 0,5 kNm – 500 kNm | Kegagalan gigi ring gear, miring |
| Torsi Kerja | Torsi inersia tarik gesekan | 0,5 kNm – 200 kNm | Motor kelebihan beban, keausan roda gigi cacing |
| Kecepatan Keluaran | Laju perubahan tegangan yang diperlukan (°/mnt atau rpm) | 0,01 – 10 rpm | Kesalahan pemosisian, kelebihan panas |
| Rasio Roda Gigi | Kebutuhan yang mengunci sendiri vs. efisiensi | 20:1 – 100:1 | Mengemudi mundur, kebutuhan rem |
Pertimbangan Lingkungan dan Siklus Kerja
Drive yang memenuhi persyaratan beban mekanis di atas kertas masih bisa gagal lebih awal jika spesifikasi lingkungannya salah. Penggerak slewing horizontal banyak digunakan di luar ruangan, seringkali dalam kondisi yang sulit, dan housing, penyegelan, serta perawatan permukaan harus disesuaikan dengan lingkungan pengoperasian.
- Peringkat IP: Untuk aplikasi luar ruangan, umumnya diperlukan minimal IP65 untuk mengecualikan debu dan pancaran air. Lingkungan laut atau pesisir memerlukan IP67 atau lebih tinggi, dengan pengencang baja tahan karat dan perlindungan korosi tambahan pada permukaan terbuka. Konfirmasikan bahwa peringkat IP berlaku untuk drive yang dirakit lengkap termasuk antarmuka motor — beberapa drive diberi peringkat IP65 pada wadahnya tetapi memiliki permukaan pemasangan motor yang tidak terlindungi sehingga menjadi titik masuknya.
- Kisaran Suhu: Pelumas standar bekerja dengan baik pada suhu antara −20°C dan 80°C. Aplikasi di lingkungan Arktik, instalasi gurun, atau di dekat sumber panas industri memerlukan gemuk bersuhu rendah atau bersuhu tinggi tertentu. Konfirmasikan spesifikasi pelumas dari produsen penggerak dan kisaran suhu yang dicakupnya sebelum menyelesaikan pemilihan untuk penerapan di iklim ekstrem.
- Siklus Tugas: Penggerak slewing horizontal in solar tracking applications typically operate intermittently — a brief movement every few minutes — placing low thermal demands on the worm gear assembly. Drives used in continuous-rotation applications such as antenna positioners or turntables face much higher thermal loads and require duty cycle ratings (expressed as operating time percentage) that match the application. Exceeding the duty cycle rating leads to lubricant degradation and accelerated worm gear wear.
- Perlindungan Korosi: Penggerak standar menggunakan rumah baja berlapis seng-fosfat dan dicat yang memadai untuk lingkungan pedalaman. Instalasi di pesisir dan lepas pantai memerlukan rumah galvanis hot-dip, cincin keluaran baja tahan karat, atau permukaan berlapis epoksi tergantung pada kategori korosifitas lokasi.
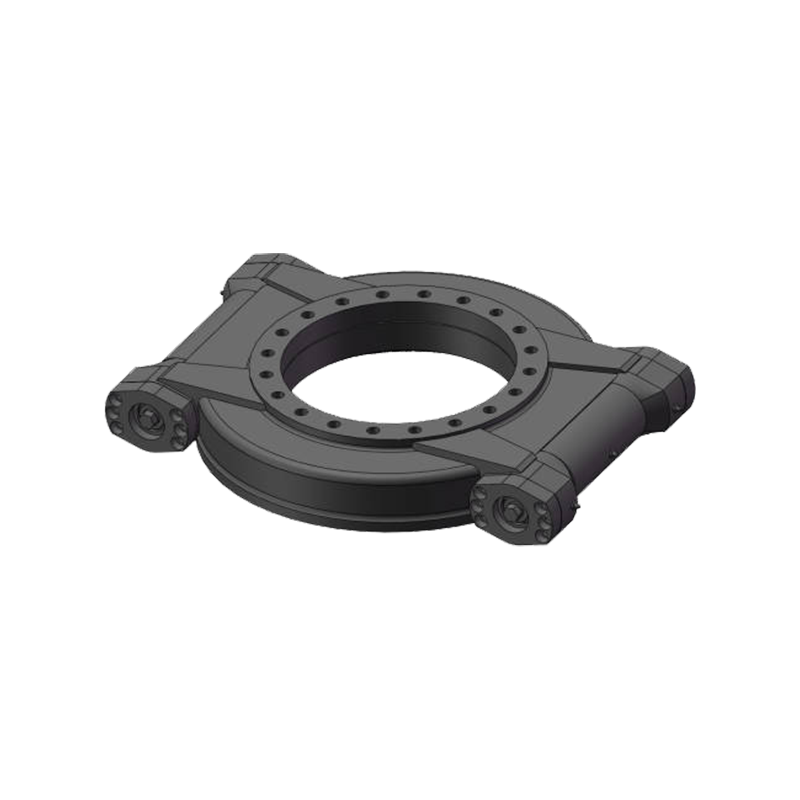
Konfigurasi Pemasangan dan Geometri Antarmuka
Integrasi fisik penggerak slewing ke dalam struktur sekitarnya merupakan kendala praktis yang harus diselesaikan selama pemilihan, bukan selama pemasangan. Penggerak slewing horizontal tersedia dengan konfigurasi cincin keluaran yang berbeda — roda gigi eksternal (gigi di bagian luar cincin keluaran), roda gigi internal (gigi di bagian dalam), dan ompong (digerakkan oleh gesekan atau sambungan langsung) — masing-masing disesuaikan dengan pengaturan kinematik yang berbeda. Cincin keluaran roda gigi eksternal adalah yang paling umum dan memungkinkan poros cacing diposisikan di luar diameter cincin, sehingga motor dan kotak roda gigi dapat diakses untuk pemeliharaan. Konfigurasi roda gigi internal digunakan ketika penggerak harus diintegrasikan ke dalam rakitan berputar kompak.
Dimensi lingkaran baut pada rumah tetap dan cincin keluaran berputar harus disesuaikan dengan struktur berpasangan. Banyak pabrikan menawarkan pola baut, flensa pemasangan, dan antarmuka poros keluaran yang disesuaikan sebagai opsi standar — menentukan hal ini pada tahap pemesanan jauh lebih murah dibandingkan adaptor pemesinan di lapangan. Verifikasi juga diameter lubang tembus jika kabel, saluran hidrolik, atau selang pneumatik harus melewati bagian tengah penggerak — tidak semua penggerak slewing horizontal memiliki lubang tengah, dan perkuatan fitur ini tidak dapat dilakukan.

Faktor Keamanan dan Harapan Masa Pakai
Peringkat beban yang dipublikasikan untuk penggerak slewing horizontal biasanya didasarkan pada beban tahan statis atau perhitungan umur kelelahan dinamis, dan menerapkan faktor keamanan yang sesuai di atas beban operasi yang dihitung adalah praktik teknik standar. Untuk sebagian besar aplikasi yang tidak kritis terhadap keselamatan, faktor keamanan sebesar 1,5× hingga 2× pada torsi kerja dan kapasitas beban sudah sesuai. Untuk aplikasi di mana kegagalan penggerak menimbulkan risiko bagi personel — platform kerja udara, peralatan penentuan posisi medis, atau derek yang dipasang di kendaraan — faktor keselamatan 3× atau lebih tinggi dapat ditentukan, dan sertifikasi pihak ketiga terhadap standar keselamatan mesin yang relevan (seperti EN 13000 untuk derek atau ISO 11684 untuk peralatan pertanian) harus dikonfirmasikan kepada produsen penggerak.
Masa pakai yang diharapkan harus didiskusikan dalam istilah umur bantalan L10 (jumlah jam pengoperasian di mana 10% dari populasi penggerak yang identik diperkirakan akan menunjukkan kegagalan kelelahan bantalan) dan umur kelelahan permukaan roda gigi cacing. Untuk aplikasi pelacakan tenaga surya, umur desain 25 tahun adalah norma industri; konfirmasikan bahwa perhitungan umur L10 pabrikan didasarkan pada profil beban pengoperasian aplikasi yang sebenarnya, bukan kondisi referensi umum.
Daftar Periksa Praktis Sebelum Menyelesaikan Pilihan Anda
- Pastikan beban aksial, beban radial puncak, dan momen guling maksimum dalam kondisi terburuk (biasanya kecepatan angin maksimum dikombinasikan dengan beban eksentrik maksimum)
- Pastikan torsi kerja pengenal penggerak yang dipilih melebihi torsi keluaran yang diperlukan yang dihitung berdasarkan faktor keamanan yang dipilih
- Periksa rasio gigi untuk mengunci sendiri jika diperlukan penahan posisi pasif, atau konfirmasikan spesifikasi rem jika tidak
- Pastikan peringkat IP, kisaran suhu, dan perlindungan korosi sesuai dengan lingkungan pemasangan
- Verifikasi dimensi lingkaran baut, konfigurasi cincin keluaran, dan persyaratan lubang tengah terhadap desain struktur perkawinan
- Minta perhitungan umur bantalan L10 berdasarkan profil beban aplikasi aktual, bukan kondisi referensi katalog
- Konfirmasikan kompatibilitas antarmuka motor — ukuran rangka, diameter poros, dan standar flensa pemasangan (IEC atau NEMA)
- Tinjau spesifikasi pelumasan dan interval pelumasan ulang terhadap jadwal perawatan yang direncanakan
Pemilihan penggerak slewing horizontal memberikan penghargaan pada analisis metodis. Drive itu sendiri merupakan komponen yang kuat dan telah terbukti — kegagalan yang terjadi di lapangan hampir selalu dapat ditelusuri ke parameter beban yang tidak ditentukan, peringkat lingkungan yang tidak sesuai, atau batasan antarmuka yang terabaikan. Kerjakan masing-masing variabel di atas secara sistematis, libatkan dukungan teknik pabrikan ketika kondisi aplikasi tidak biasa, dan hasilnya adalah hard disk yang bekerja dengan andal selama masa pakai sistem yang didukungnya.

Jiangsu Manchen Transmission Technology Co., Ltd unggul dalam menciptakan bantalan sleewing khusus, andal, dan tepat untuk industri yang beragam, terus berinovasi untuk memenuhi standar tertinggi dan mencari peluang kolaboratif. Pemasok bantalan slewing yang andal dan mantap di Cina.
Tautan cepat
Tautan produk
Hubungi kami
-
Address:No. 8, Nanqiu Road, Huangtu Town, Jiangyin City , China
-
Tel:+86-13646122221
-
E-mail:
-
E-mail:ma@slewingbearingcn.com
